CERBERO Use Cases
Self-Healing System for Planetary Exploration |
Ocean Monitoring |
Smart Travelling for Electric Vehicle |
|||||
|---|---|---|---|---|---|---|---|
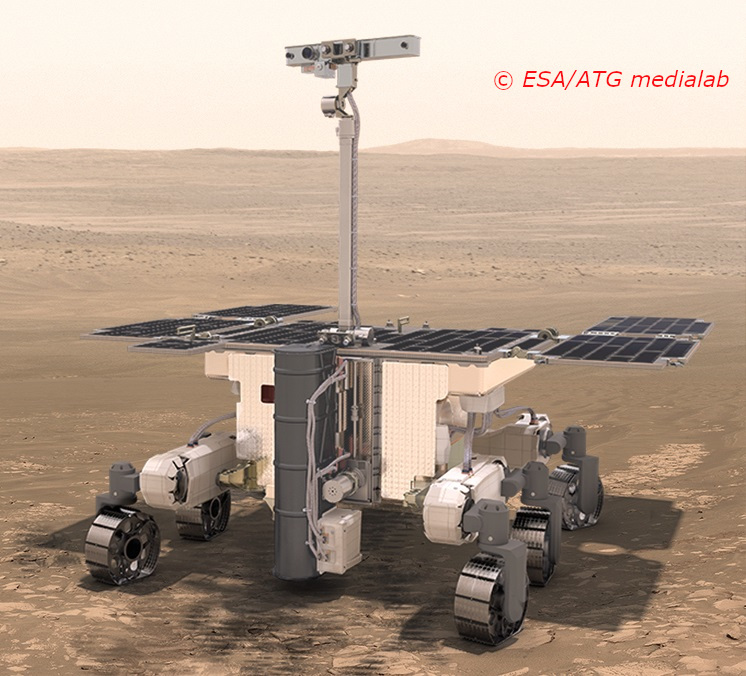 The Planetary Exploration use case focus on the future planetary exploration rover, which will be the first mission to combine the capability to move across the surface and to study future planetary exploration at depth. Read more… |
 Smart video-sensing unmanned vehicles with immersive environmental monitoring capabilities and capable of individual and fleet self-operation and navigation. All of this, has to be realized with smart multi-lens camera systems based on COTS components. Read more… |
 The Smart Travelling for Electric Vehicle scenario is the most networked one, being composed of different sub-systems, including the Electric Vehicle, the Person possessing a Personal Agenda, the Smart Energy Grid and the Smart Mobility that provides mobility-aware functionality. Read more… |



 © 2017 CERBERO | All Rights Reserved |
Project ID: 732105,
Funded under: H2020-EU.2.1.1. - INDUSTRIAL LEADERSHIP - Leadership in enabling and industrial technologies - Information and Communication Technologies (ICT).
© 2017 CERBERO | All Rights Reserved |
Project ID: 732105,
Funded under: H2020-EU.2.1.1. - INDUSTRIAL LEADERSHIP - Leadership in enabling and industrial technologies - Information and Communication Technologies (ICT).