Ocean Monitoring

Scenario Description
Smart video-sensing unmanned vehicles with immersive environmental monitoring capabilities and capable of individual and fleet self-operation and navigation. All of this, has to be realized with smart multi-lens camera systems based on COTS components. However, current vision/sensing technologies for OM are based on default software on existing off-the-shelf cameras and other sensors, not originally intended for marine applications. Furthermore, vision/sensing challenges that occur on sea surface, but particularly subsea, are not addressed. CERBERO will define algorithms for data analysis and information fusion to enable smart adaptation strategies to address rapidly changing environment conditions in order to obtain or maintain positions on sea. Specific challenges that will be addressed during the project involve the study and develop strategies and tools to minimize the designer effort required system-level analysis in the different design cycles; new adaptive image processing methods for enhancing the captured imagery, along with object/motion detection; and improved system-level (self-)adaptive run-time management of vision/sensing capabilities.
The CERBERO Solution
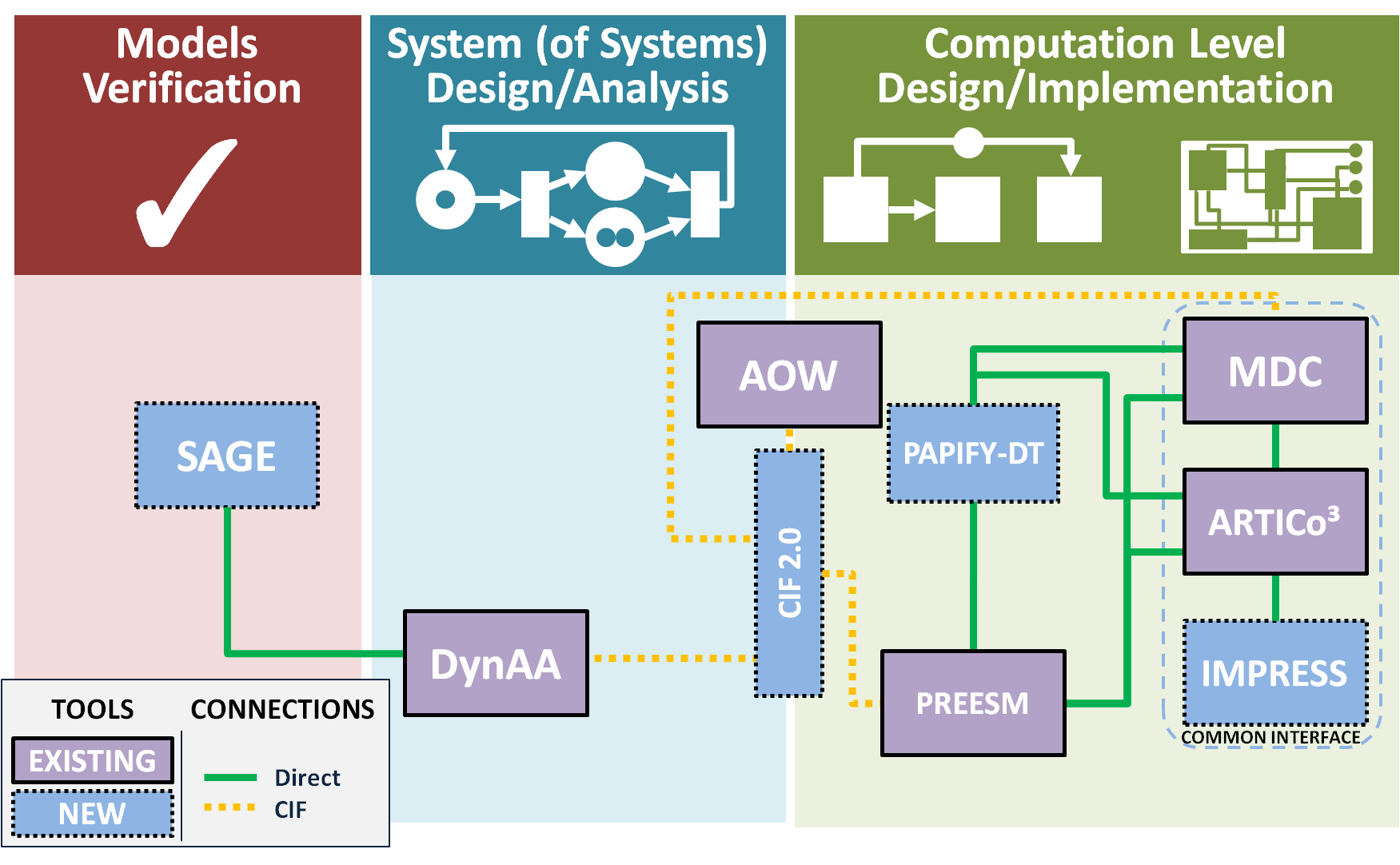
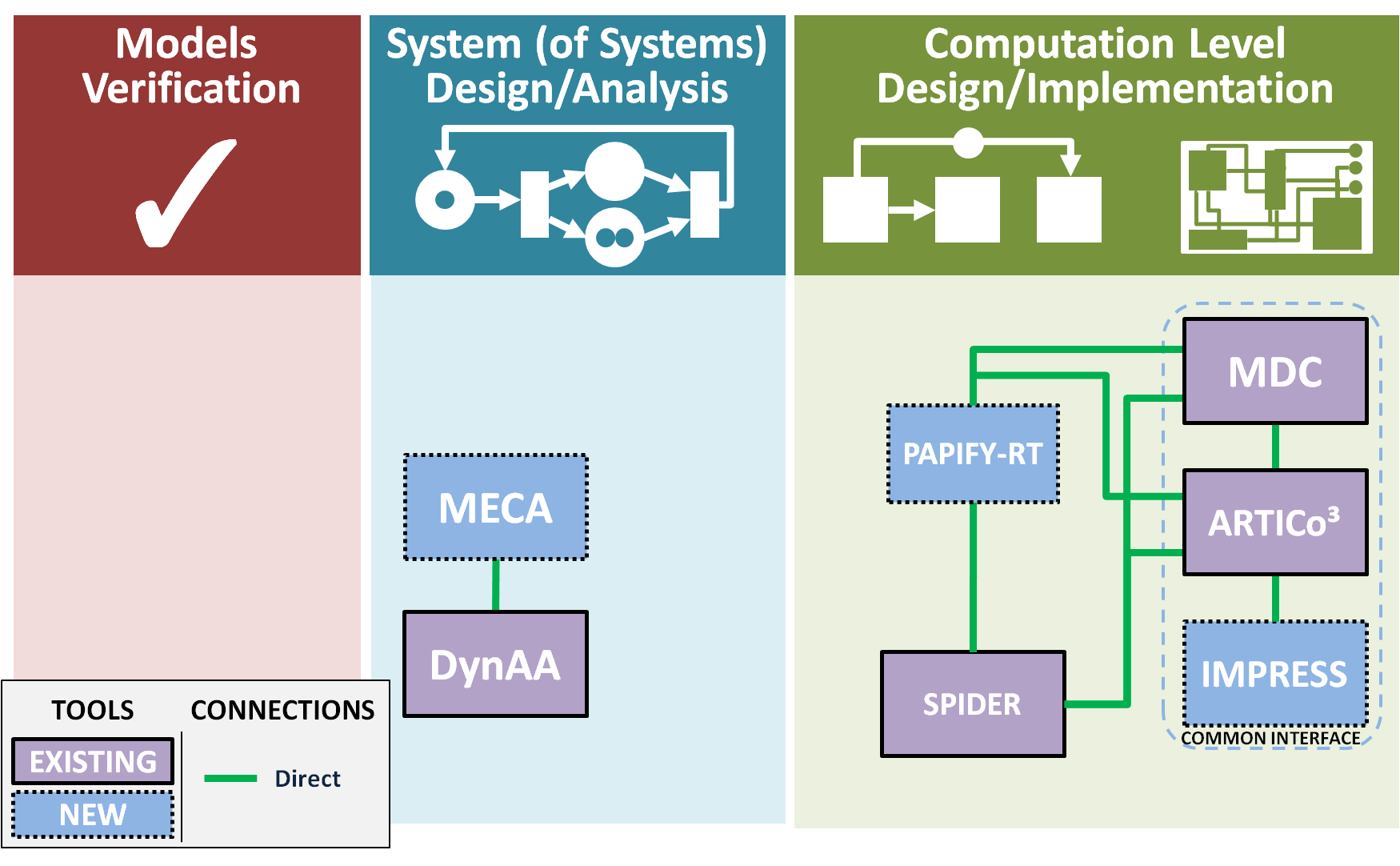
Toolchain for Ocean Monitoring
Design-Time Support |
Run-Time Support |
|---|---|
 |
 |
Ocean Monitoring Demonstrating Video
This video shows the test of marine robot with three of AmbieSense cameras installed that recorded footage under different light conditions: daylight, mid-dark, and dark. The light-conditions were in this simulated with a membrane that was gradually pulled over the pool for research purposes.
Visit AmbieSense YouTube Channel for more videos



 © 2017 CERBERO | All Rights Reserved |
Project ID: 732105,
Funded under: H2020-EU.2.1.1. - INDUSTRIAL LEADERSHIP - Leadership in enabling and industrial technologies - Information and Communication Technologies (ICT).
© 2017 CERBERO | All Rights Reserved |
Project ID: 732105,
Funded under: H2020-EU.2.1.1. - INDUSTRIAL LEADERSHIP - Leadership in enabling and industrial technologies - Information and Communication Technologies (ICT).