Smart Travelling for Electric Vehicle
 Scenario description
Scenario description
The Smart Travelling for Electric Vehicle scenario is the most networked one, being composed of different sub-systems, including the Electric Vehicle, the Person possessing a Personal Agenda, the Smart Energy Grid and the Smart Mobility that provides mobility-aware functionality (e.g. parking places, charge points, etc.). Due to the different involved heterogeneous concurrent sub-systems, this scenario requires a high degree of autonomy and support for adaptability to cope with real life circum- stances. Moreover, it requires to integrate the distributed communication layers of the different involved systems. The proposed model-based approach and its corresponding design framework is meant to facilitate the design of such a complex CPSoS, where several dependencies and a plethora of highly different requirements have to be considered.
Scenario Challenges
- Real time system in the loop simulations, where battery and motor models from TNO were added to the simulator
- Multi-Objective Run-Time Optimisation, were multiple KPIs and user preferences were used to optimise itineraries for the driver
- Run-Time SoS Level Adaptation by monitoring both the car, the driver and the environment during the drive and adapt when needed
The CERBERO Solution
Toolchain for Smart Travelling for Electric Vehicle
To solve the mentioned challenges, the tools DynAA from TNO and MECA from S&T were used to implement the required simulation, advice and adaptation functionalities. Furthermore a special Human Machine Interface was added by Abinsula to provide advice to the driver and interact on required adaptations. For realisation of the adaptation loop the CERBERO adaptation skeleton and methodology for handling multiple KPIs was applied. The methodologies and tools developed in this Use Case have been integrated into the Virtual Reality Driving Simulator of CRF, the Research Center of FCA.
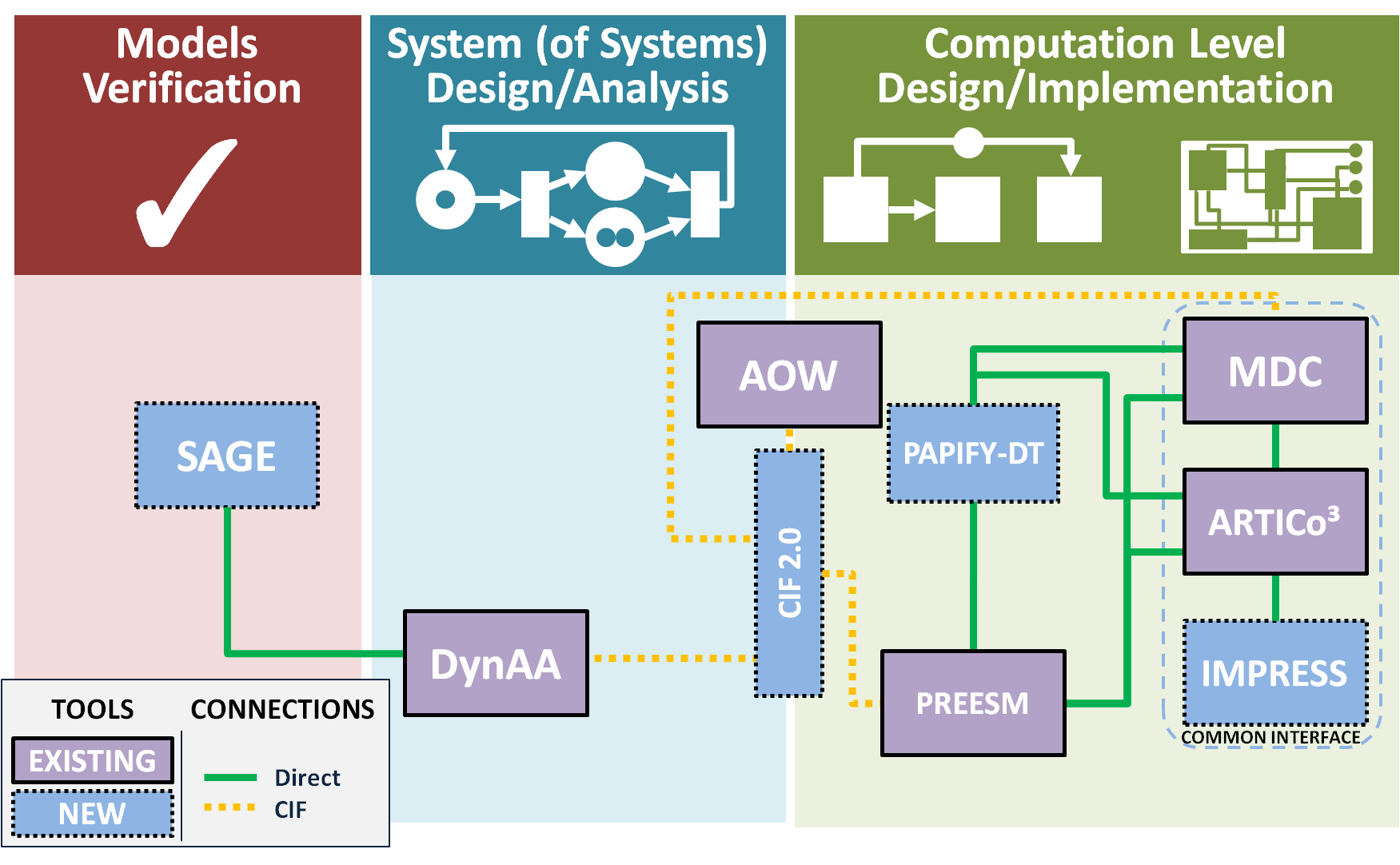
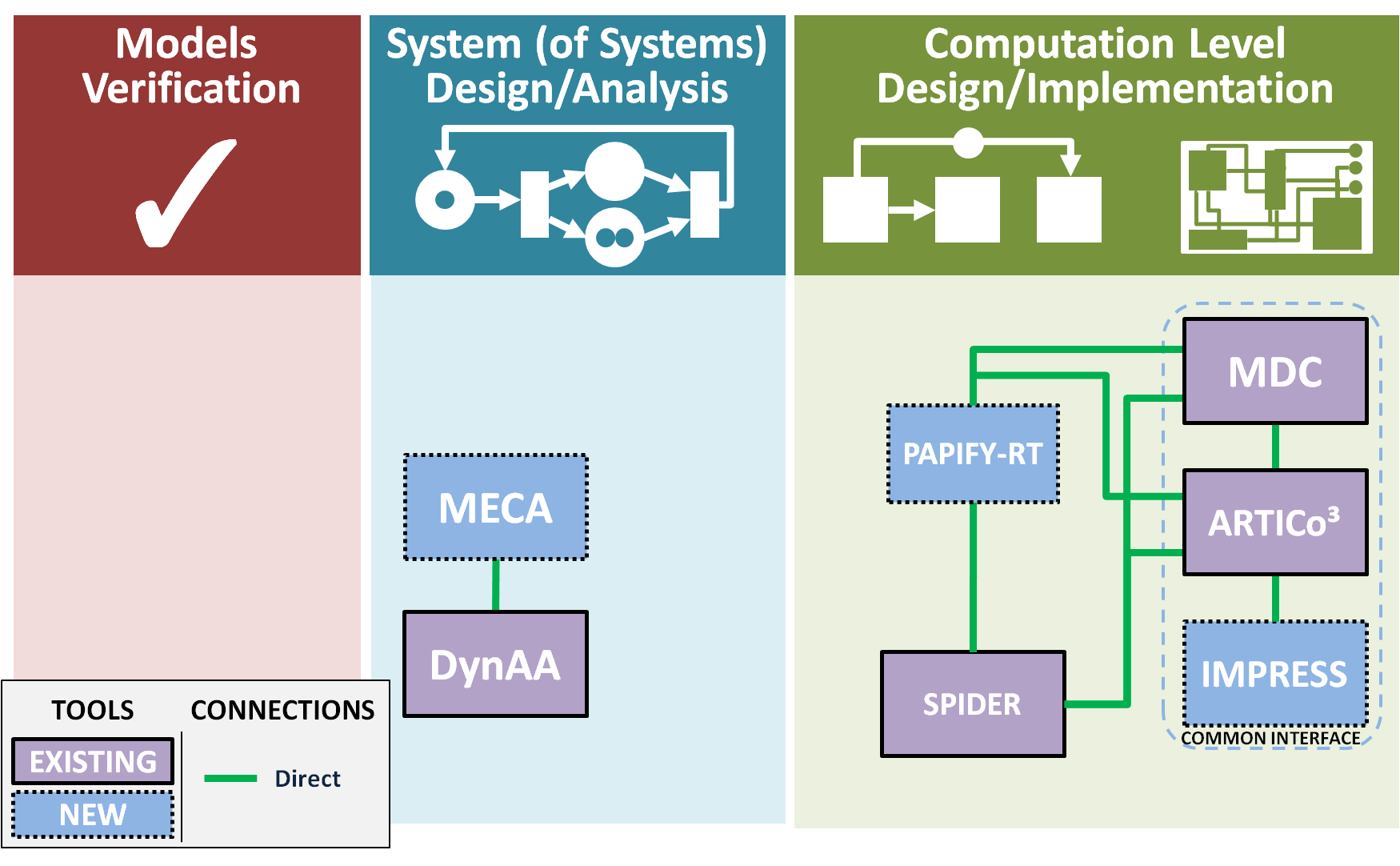
Design-Time Support |
Run-Time Support |
|---|---|
 |
 |
Smart Travelling Demonstrating Video
In the Smart Travelling use case the Driving Simulator of CRF was upgraded with custom battery and motor models for electric vehicles and a self-adaptive driver assistant. Thanks to the flexibility of the Driving Simulator, it was possible to integrate CERBERO tools and technologies in the system to create the scenario for Smart Travelling Use Case and testing the self-adaptive runtime strategies. In the video an overview is given of the Smart Travelling use case and how CERBERO technologies and tools were used to develop the use case.



 © 2017 CERBERO | All Rights Reserved |
Project ID: 732105,
Funded under: H2020-EU.2.1.1. - INDUSTRIAL LEADERSHIP - Leadership in enabling and industrial technologies - Information and Communication Technologies (ICT).
© 2017 CERBERO | All Rights Reserved |
Project ID: 732105,
Funded under: H2020-EU.2.1.1. - INDUSTRIAL LEADERSHIP - Leadership in enabling and industrial technologies - Information and Communication Technologies (ICT).